


山东经世智能科技有限公司
公众号
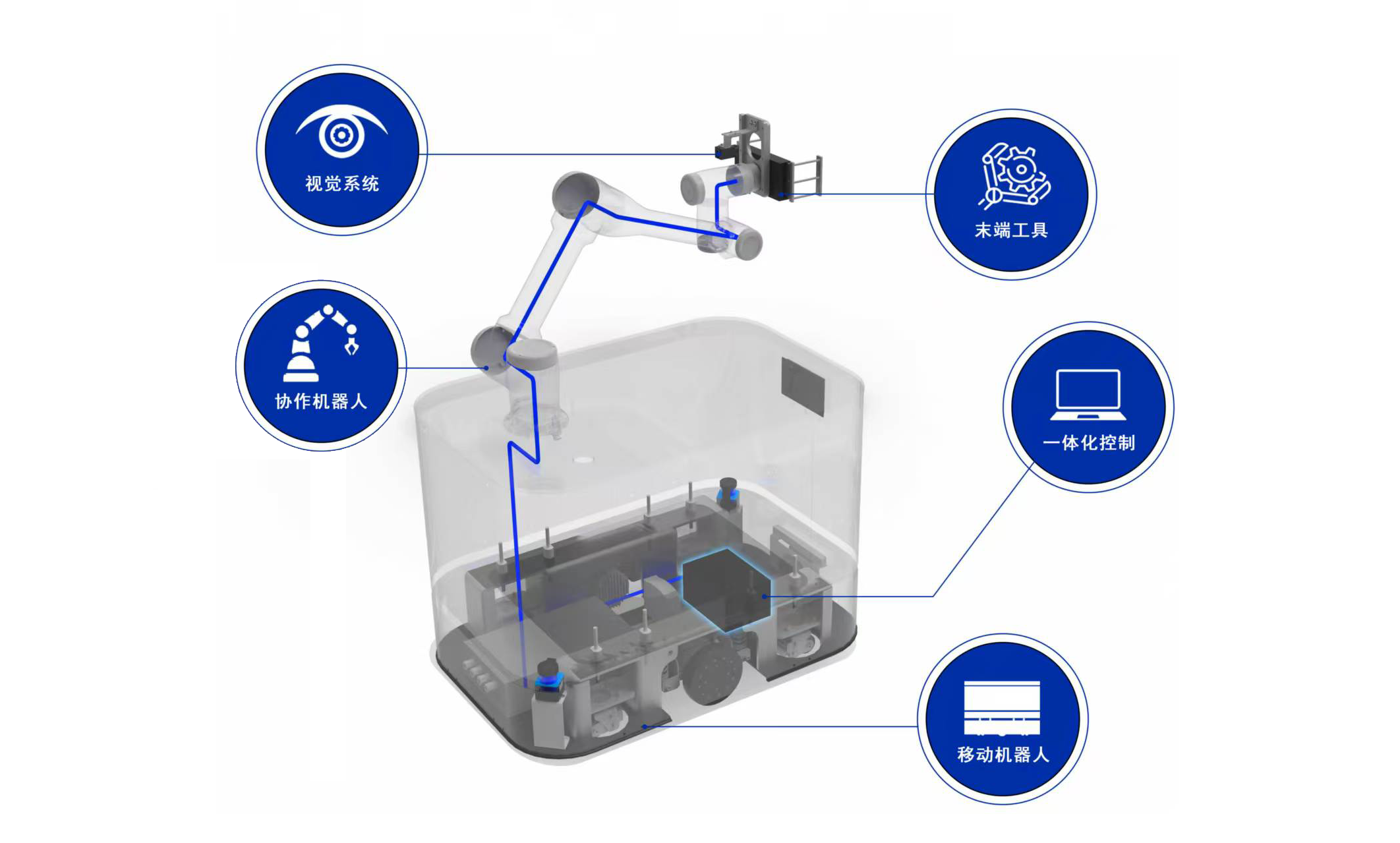
功耗更低|复合机器人专用一体化控制器
创造性地将视觉、底盘、协作臂三大控制器进行算法融合统一,相比常规复合机器人系统集成方案,控制器在设备占用空间、设备整体功耗等方面具备绝对优势
精度更高|车身姿态动态补偿系统
自动检测车身因外部因素造成的姿态变换,统一姿态算法,动态输出未端位姿
运行更稳定|复合机器人统一姿态模型
经世机器人在一体化控制器中建立复合机器人统一姿态模型,实现逻辑运算的同时完成统一姿态运算,计算闭环后直接输出未端抓取位姿
寿命更长|车身悬挂自动补偿
大负载车辆全轮悬挂,避免机械臂末端动态力冲击,延长设备寿命
节拍更快|无视觉直接抓取
部分场景机械臂末端无需安装视觉相机,直接抓取,效率更高
实施周期更短|MCR-Master复合机器人操作系统
兼容多种调试终端,无代码,零编程,积木式搭建,底盘、协作臂统一到一个平台上完成调试,无须反复切换,无经验人员1天学习即可上手
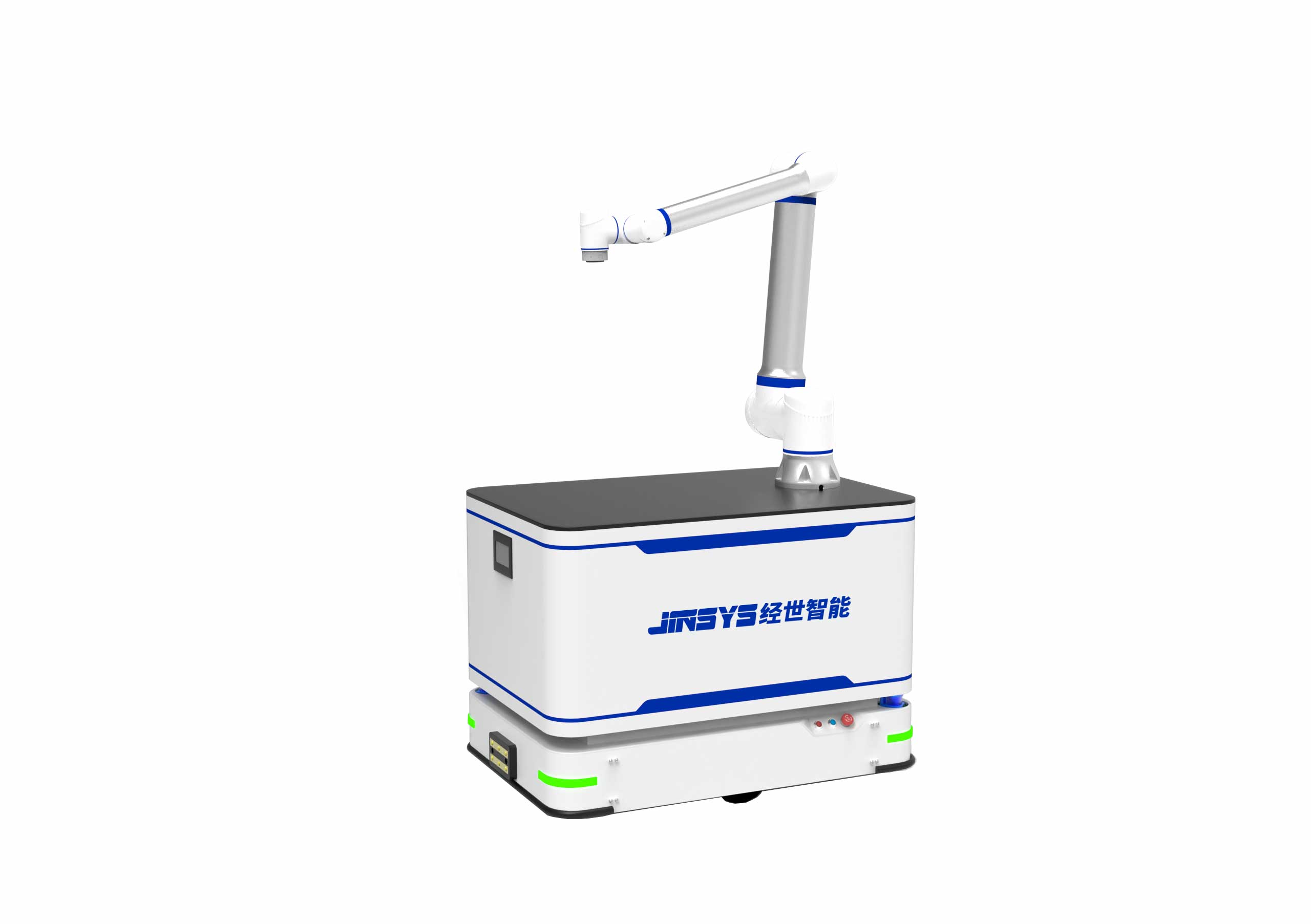
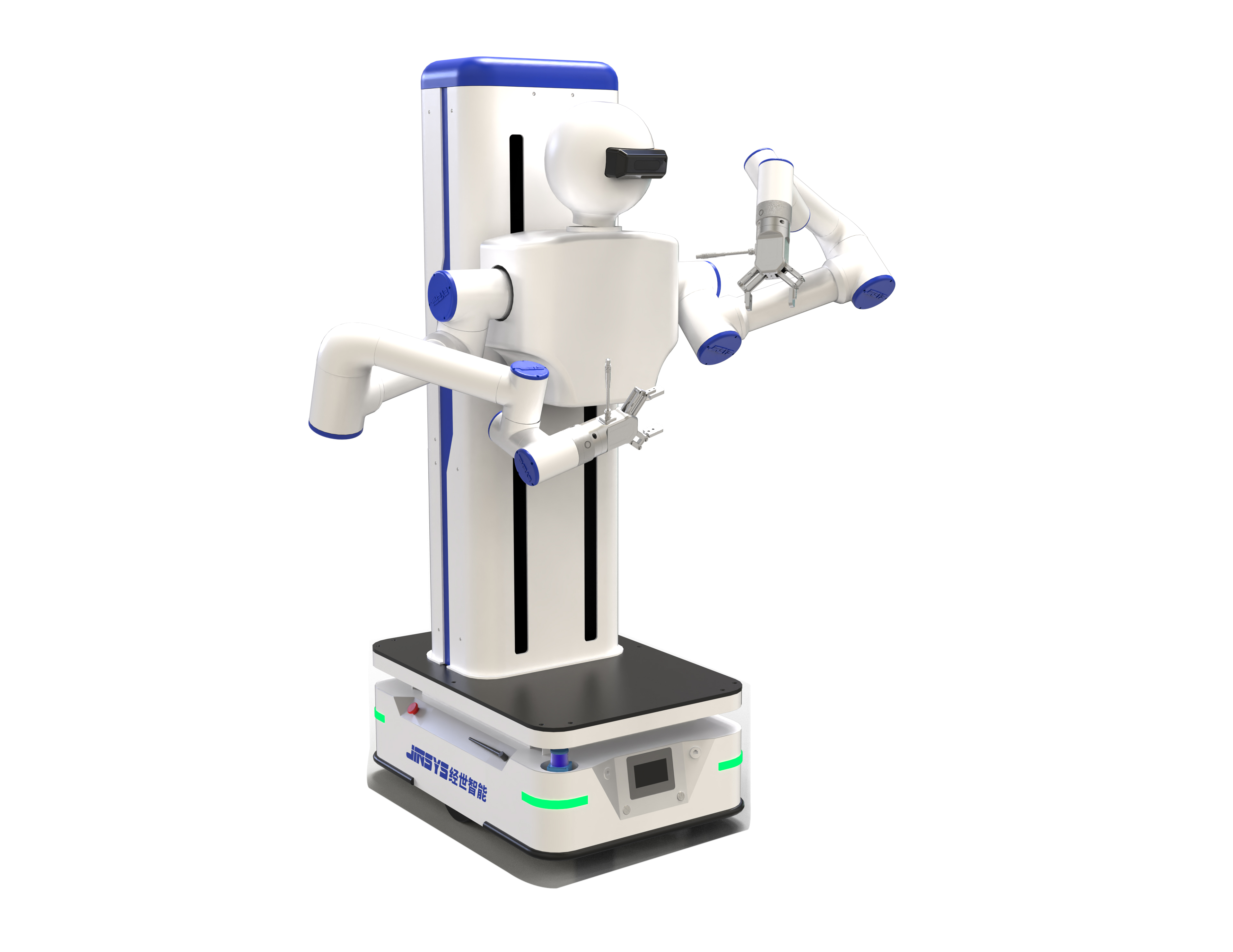
复合机器人

复合机器人
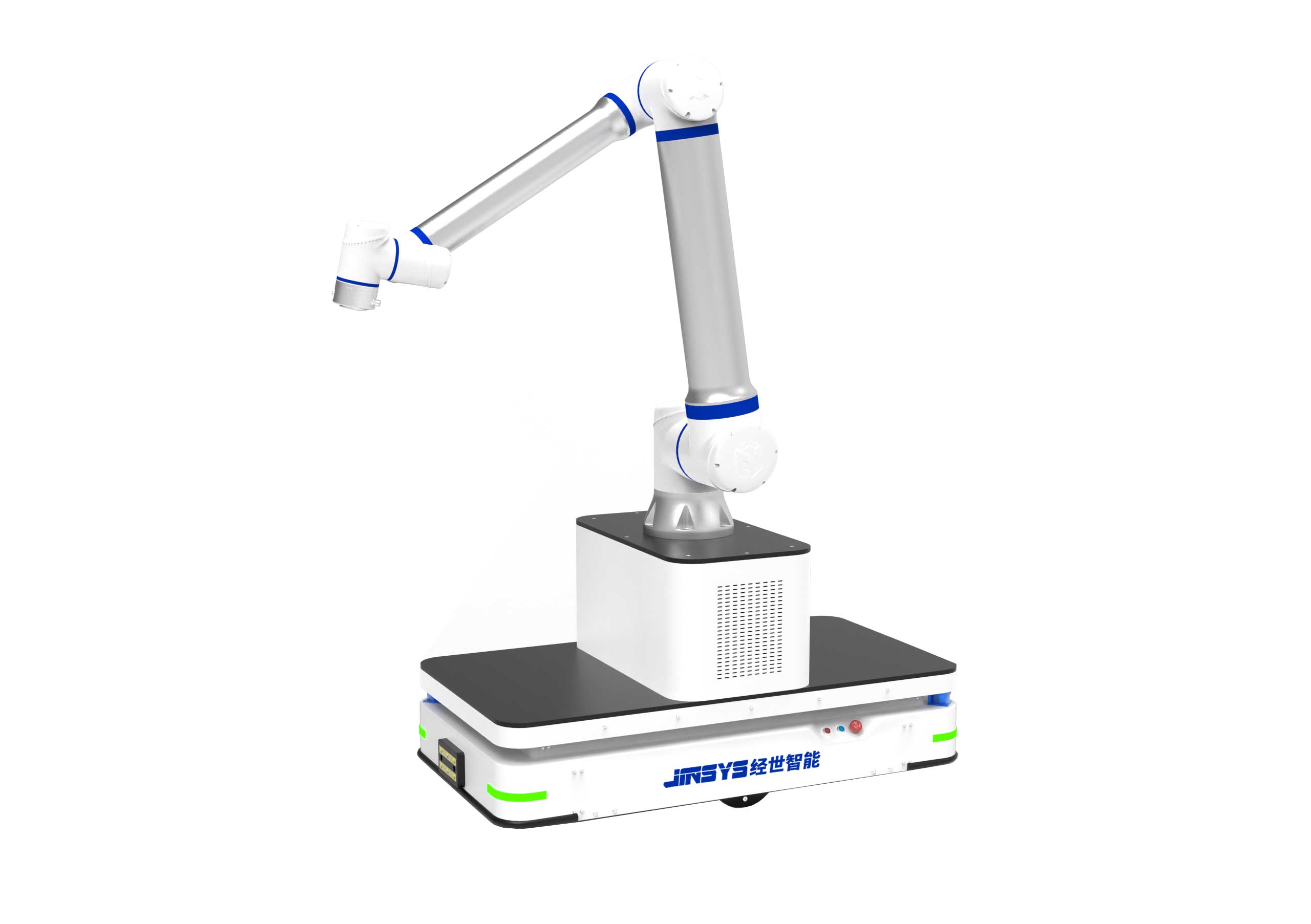
复合机器人

复合机器人
复合机器人集成AGV+机械臂+视觉系统,提供CNC多工序柔性上下料
查看详情复合机器人在3C电子行业聚焦物料转运与仓储管理、精密设备上下料、
查看详情复合机器人在智慧实验室行业主要应用于实验样本自动化转运、高通量实验流程衔接
查看详情复合机器人在智慧档案库房行业主要应用于档案自动存取与转运、高密度存储下精准作业
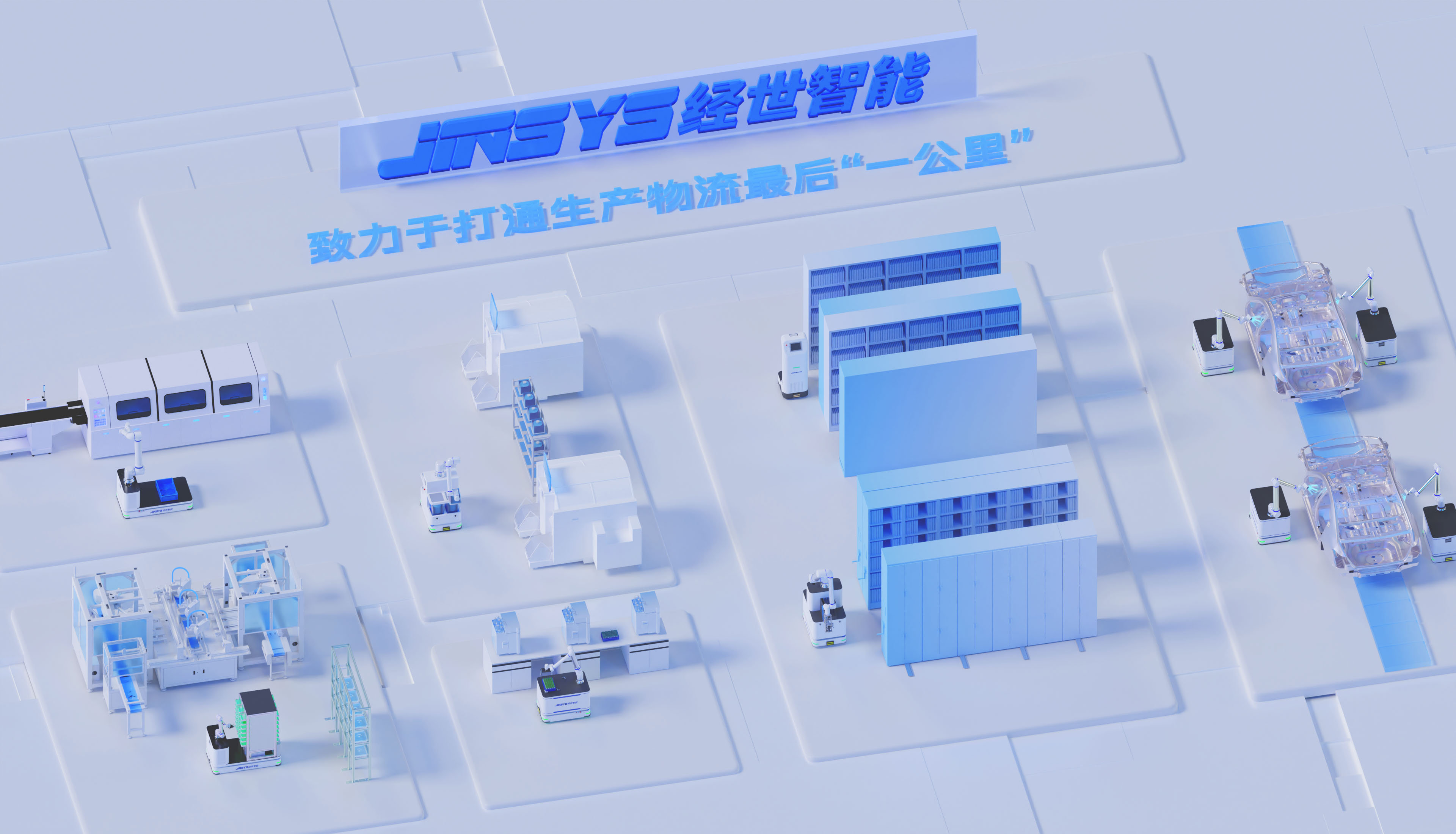
查看详情经世依托于数字孪生+具身智能一体化控制技术,构建了可以快速落地部署应用的移动复合机器人,打造了多种“移动”+“作业”的产品形态。
我们希望与渠道合作伙伴建立互利共赢的合作关系,共同开拓机器人设备市场,探索跨行业、跨场景的多机台柔性作业解决方案,为客户提供优质的产品和服务。
.Cm1FUuxM.png)